Lagrange Labs Launches Halo, the Coordination Engine for Autonomous Systems
Halo is the first shared-state coordination layer that enables drones, robots, and uncrewed vessels to maintain mission continuity under communications failure, electronic warfare, and network fragmentation – without central control.
New York, NY, June 24, 2026 --(PR.com)-- Lagrange Labs today announced the launch of Halo, the coordination engine for autonomous systems: a distributed-systems layer that keeps swarms of drones, robots, and uncrewed vessels operating in agreement when communications degrade, individual platforms drop offline, and the network underneath them fragments. It is the first coordination engine purpose-built to run beneath any existing autonomy stack, without requiring teams to rewrite the mission software they have already deployed.
The launch comes as autonomous systems reach industrial scale in exactly the conditions that break conventional coordination logic. Defense programs worldwide are producing drones in record numbers and fielding them along front lines that rank among the densest electronic-warfare environments in modern history—where the radio signals autonomous systems depend on are routinely jammed, spoofed, or blocked entirely.
The same gap is visible across U.S. defense programs. The Pentagon's Replicator initiative set out to field thousands of autonomous systems—the public tally reached the hundreds. The Center for a New American Security has identified interoperability, the ability to get platforms from different vendors and services working together, as the missing layer. The Air Force is investing $804.4 million in Collaborative Combat Aircraft in fiscal year 2026, part of a program targeting 1,000 uncrewed aircraft designed to fly alongside crewed fighters. These teammates must handle real-time sensor fusion, threat prioritization, and maneuver decisions under limited human oversight.
"Every autonomy team has rebuilt some version of this coordination logic inside its own stack, on top of assumptions that don't survive contact with a real adversary," said Ismael Hishon-Rezaizadeh, CEO and co-founder of Lagrange Labs. "None of it composes. None of it holds when the network breaks. That is the gap the coordination engine closes."
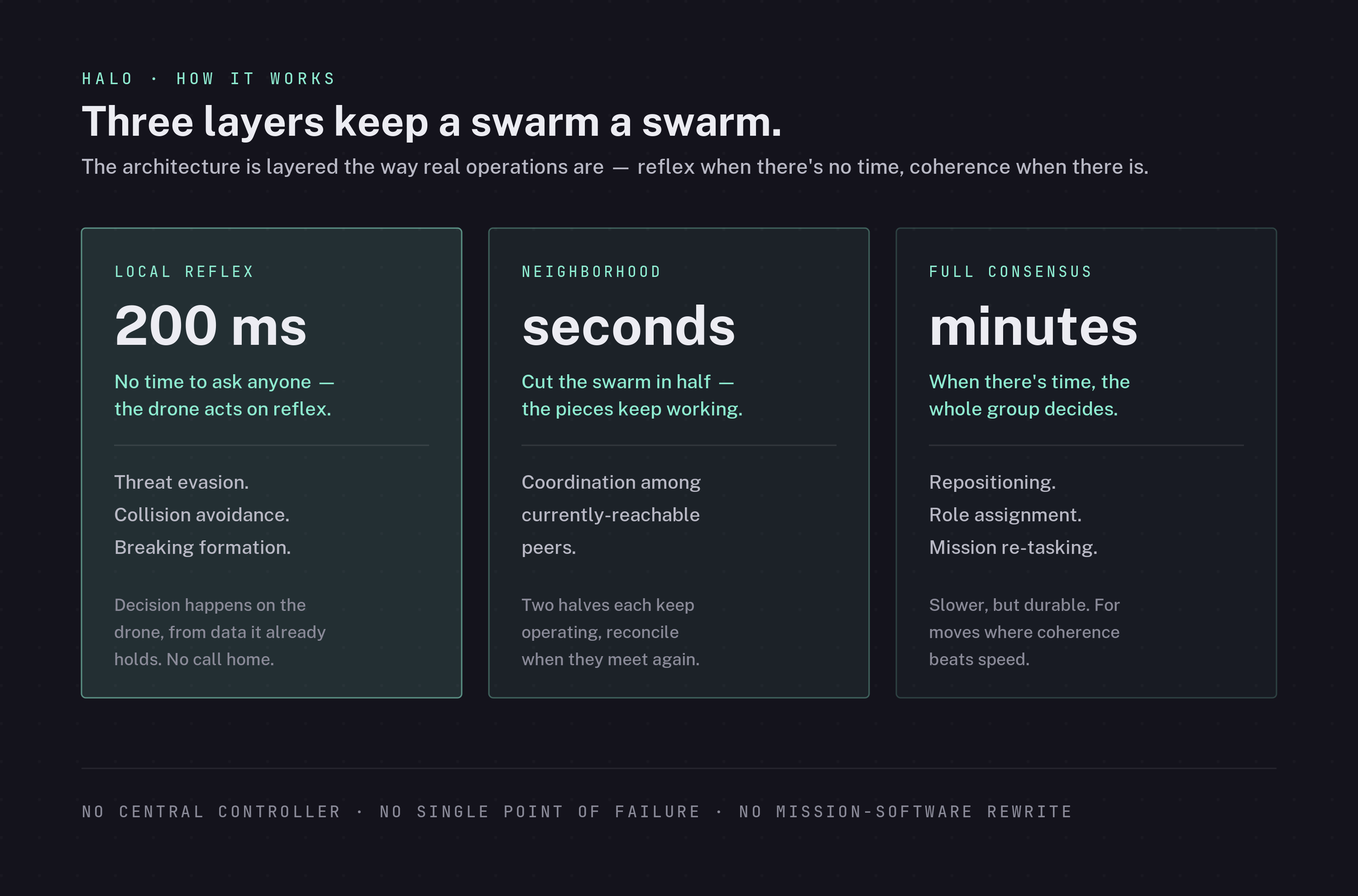
How the Coordination Engine Works
Halo operates across three layers that mirror how real operations unfold. When time permits, the full group reaches consensus on repositioning, role assignment, and any decision requiring collective agreement.
When a swarm splits—connectivity severed between subgroups—each fragment continues operating independently and reconciles when contact is restored. And when a threat demands a response in under 200 milliseconds, each platform acts on the most recent operational picture it holds locally, without waiting for a network it may not have.
Underneath those layers runs a shared-state protocol that is authenticated, ordered, and tolerant of patchy connectivity. Its failure detector is purpose-built for partial-communications environments—engineered to avoid the false positives that cause systems to declare live platforms dead and reshuffle role assignments. Recovery is cooperative: every surviving node converges on the same conclusion, because all of them are working from the same picture.
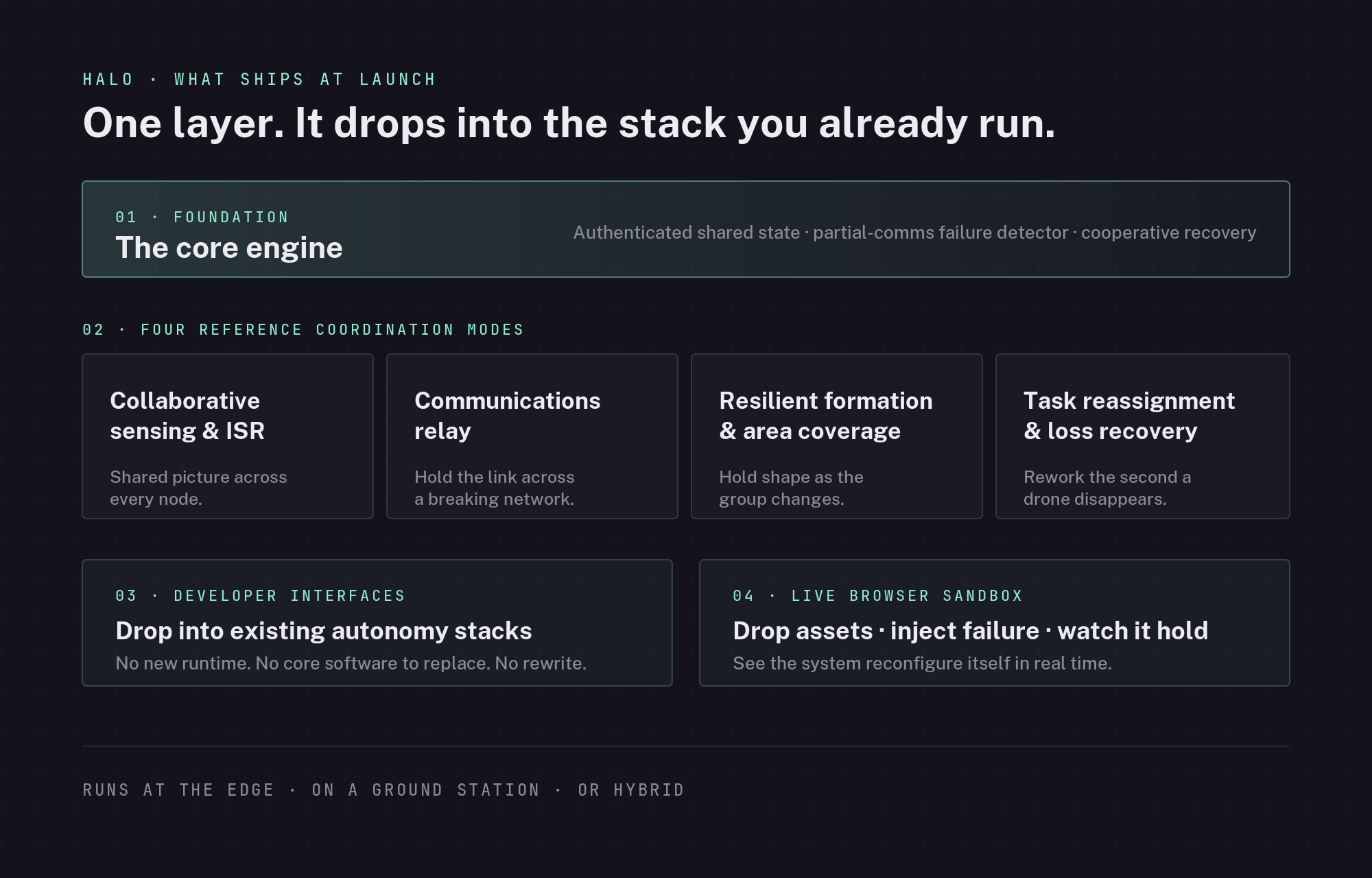
What Ships at Launch
The core coordination engine—shared-state agreement, failure detection, and dynamic reconfiguration with no central controller
Four reference coordination modes: collaborative sensing and intelligence gathering, communications relay, resilient formation flying, and task reassignment upon platform loss
Developer interfaces (SDK and APIs) that drop into existing autonomy stacks with no runtime replacement or mission-software rewrite, and are Modular Open Systems Approach (MOSA) compatible
A live, browser-based playground that lets operators and developers place assets on a map, inject failure conditions, and observe system behavior in real time
Halo runs at the edge on the platform itself, off-platform on a ground station, or in a hybrid configuration—consistent with how real operators deploy. Operators and developers can try the live playground at lagrange.dev/defense to see how Halo behaves in an active deployment.
Roadmap
Over the next six months, Lagrange Labs will move Halo into the field: trials under live electronic-warfare pressure and GPS denial, published performance scorecards, and reference-platform work with drone manufacturers already in production. Subsequent phases expand to ground and maritime domains, and to the crewed-uncrewed teaming architectures at the center of the next generation of defense programs.
Halo's architecture is not drone-specific; it maps onto any distributed autonomous system that must operate in harsh or contested conditions. Today's launch is the first step toward what Lagrange calls verifiable autonomy: coordinated action you can trust in the conditions where every other system fails.
About Lagrange Labs
Lagrange Labs is a team of distributed-systems engineers and cryptographers who have spent their careers on a single problem: how systems agree on what is true. That work is the ground truth for AI and autonomy. Halo keeps autonomous systems converging on a shared operational picture under the most contested conditions, and DeepProve generates verifiable proofs for every AI inference - without revealing the model or underlying data. See more at lagrange.dev.
The launch comes as autonomous systems reach industrial scale in exactly the conditions that break conventional coordination logic. Defense programs worldwide are producing drones in record numbers and fielding them along front lines that rank among the densest electronic-warfare environments in modern history—where the radio signals autonomous systems depend on are routinely jammed, spoofed, or blocked entirely.
The same gap is visible across U.S. defense programs. The Pentagon's Replicator initiative set out to field thousands of autonomous systems—the public tally reached the hundreds. The Center for a New American Security has identified interoperability, the ability to get platforms from different vendors and services working together, as the missing layer. The Air Force is investing $804.4 million in Collaborative Combat Aircraft in fiscal year 2026, part of a program targeting 1,000 uncrewed aircraft designed to fly alongside crewed fighters. These teammates must handle real-time sensor fusion, threat prioritization, and maneuver decisions under limited human oversight.
"Every autonomy team has rebuilt some version of this coordination logic inside its own stack, on top of assumptions that don't survive contact with a real adversary," said Ismael Hishon-Rezaizadeh, CEO and co-founder of Lagrange Labs. "None of it composes. None of it holds when the network breaks. That is the gap the coordination engine closes."
How the Coordination Engine Works
Halo operates across three layers that mirror how real operations unfold. When time permits, the full group reaches consensus on repositioning, role assignment, and any decision requiring collective agreement.
When a swarm splits—connectivity severed between subgroups—each fragment continues operating independently and reconciles when contact is restored. And when a threat demands a response in under 200 milliseconds, each platform acts on the most recent operational picture it holds locally, without waiting for a network it may not have.
Underneath those layers runs a shared-state protocol that is authenticated, ordered, and tolerant of patchy connectivity. Its failure detector is purpose-built for partial-communications environments—engineered to avoid the false positives that cause systems to declare live platforms dead and reshuffle role assignments. Recovery is cooperative: every surviving node converges on the same conclusion, because all of them are working from the same picture.
What Ships at Launch
The core coordination engine—shared-state agreement, failure detection, and dynamic reconfiguration with no central controller
Four reference coordination modes: collaborative sensing and intelligence gathering, communications relay, resilient formation flying, and task reassignment upon platform loss
Developer interfaces (SDK and APIs) that drop into existing autonomy stacks with no runtime replacement or mission-software rewrite, and are Modular Open Systems Approach (MOSA) compatible
A live, browser-based playground that lets operators and developers place assets on a map, inject failure conditions, and observe system behavior in real time
Halo runs at the edge on the platform itself, off-platform on a ground station, or in a hybrid configuration—consistent with how real operators deploy. Operators and developers can try the live playground at lagrange.dev/defense to see how Halo behaves in an active deployment.
Roadmap
Over the next six months, Lagrange Labs will move Halo into the field: trials under live electronic-warfare pressure and GPS denial, published performance scorecards, and reference-platform work with drone manufacturers already in production. Subsequent phases expand to ground and maritime domains, and to the crewed-uncrewed teaming architectures at the center of the next generation of defense programs.
Halo's architecture is not drone-specific; it maps onto any distributed autonomous system that must operate in harsh or contested conditions. Today's launch is the first step toward what Lagrange calls verifiable autonomy: coordinated action you can trust in the conditions where every other system fails.
About Lagrange Labs
Lagrange Labs is a team of distributed-systems engineers and cryptographers who have spent their careers on a single problem: how systems agree on what is true. That work is the ground truth for AI and autonomy. Halo keeps autonomous systems converging on a shared operational picture under the most contested conditions, and DeepProve generates verifiable proofs for every AI inference - without revealing the model or underlying data. See more at lagrange.dev.
Contact
Lagrange Labs
Stephen Lesser
646-229-7252
lagrange.dev
Stephen Lesser
646-229-7252
lagrange.dev
Multimedia

Categories